
|
Viele Spielzeugmodelle - Tiere, Roboter, Fahrzeuge - werden mit Infrarot-Empfänger und einer kleinen Infrarot-Fernbedienung ausgestattet, um z.B. Bewegungen oder Lichteffekte aus der Ferne zu steuern. Diese Spielzeugmodelle beinhalten dann zumeist mindestens einen kleinen Elektromotor und leuchtende oder blinkende LEDs, wobei die gesamte Steuerelektronik auf einer einzigen Platine untergebracht ist.
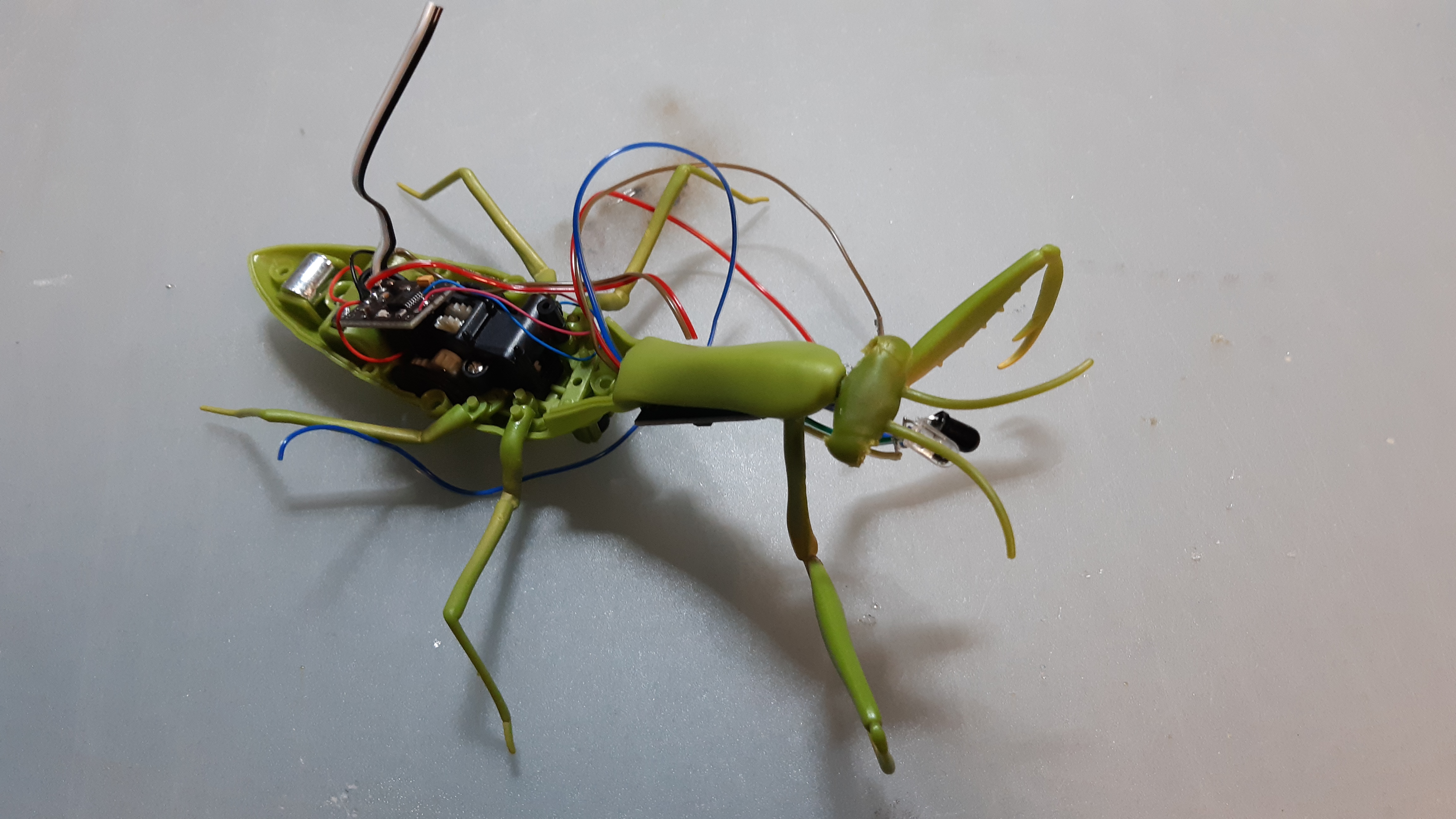
So entstand die Idee, eine bereits vorhandene Spielzeug-Mantis (oder Gottesanbeterin) mit Infrarot-Steuerung so umzubauen, dass sie später - ausgestattet mit Sensor, Motortreiber und Mikrocontroller - programmiert und autonom oder per Smartphone gesteuert werden kann:

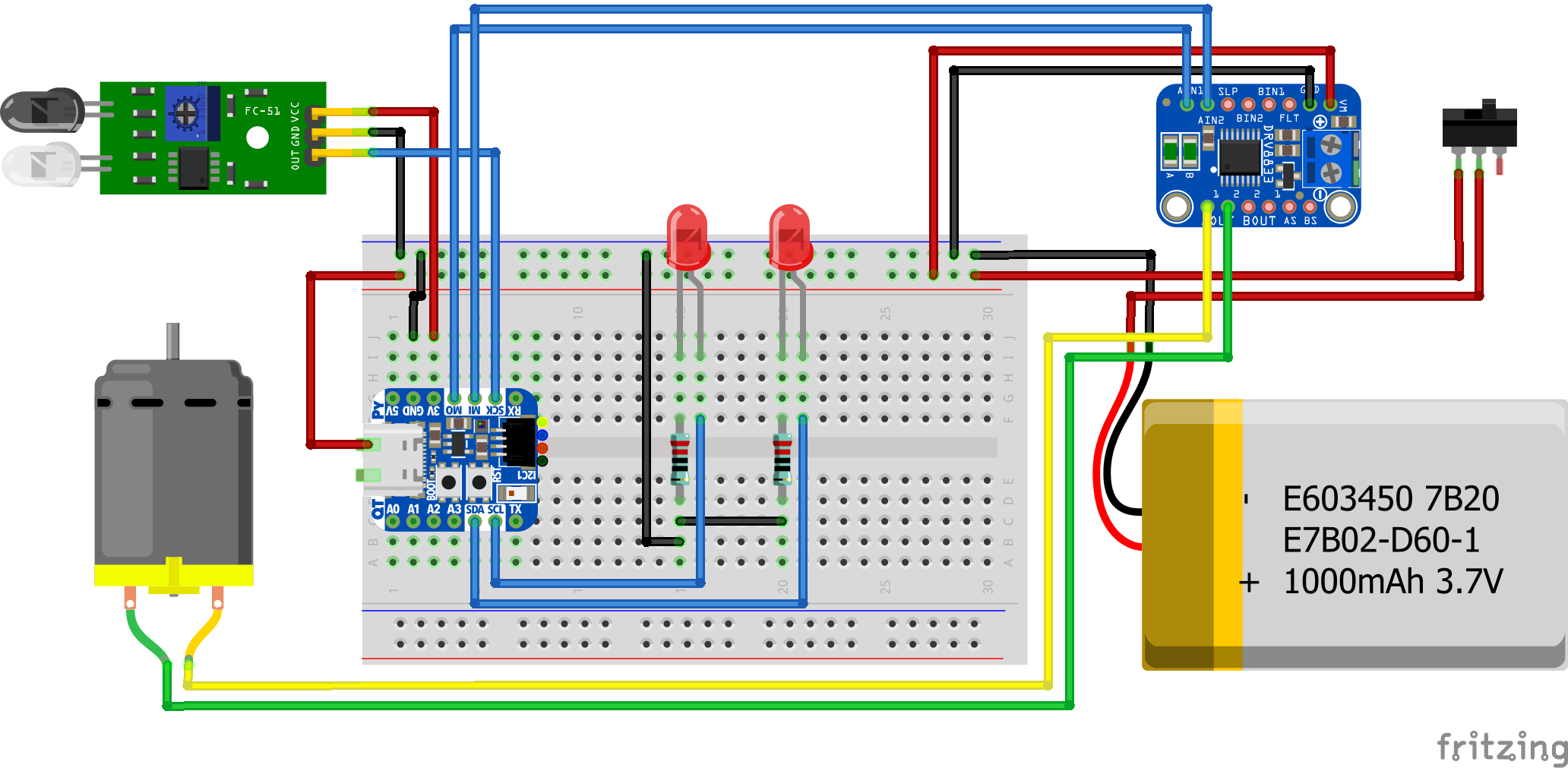
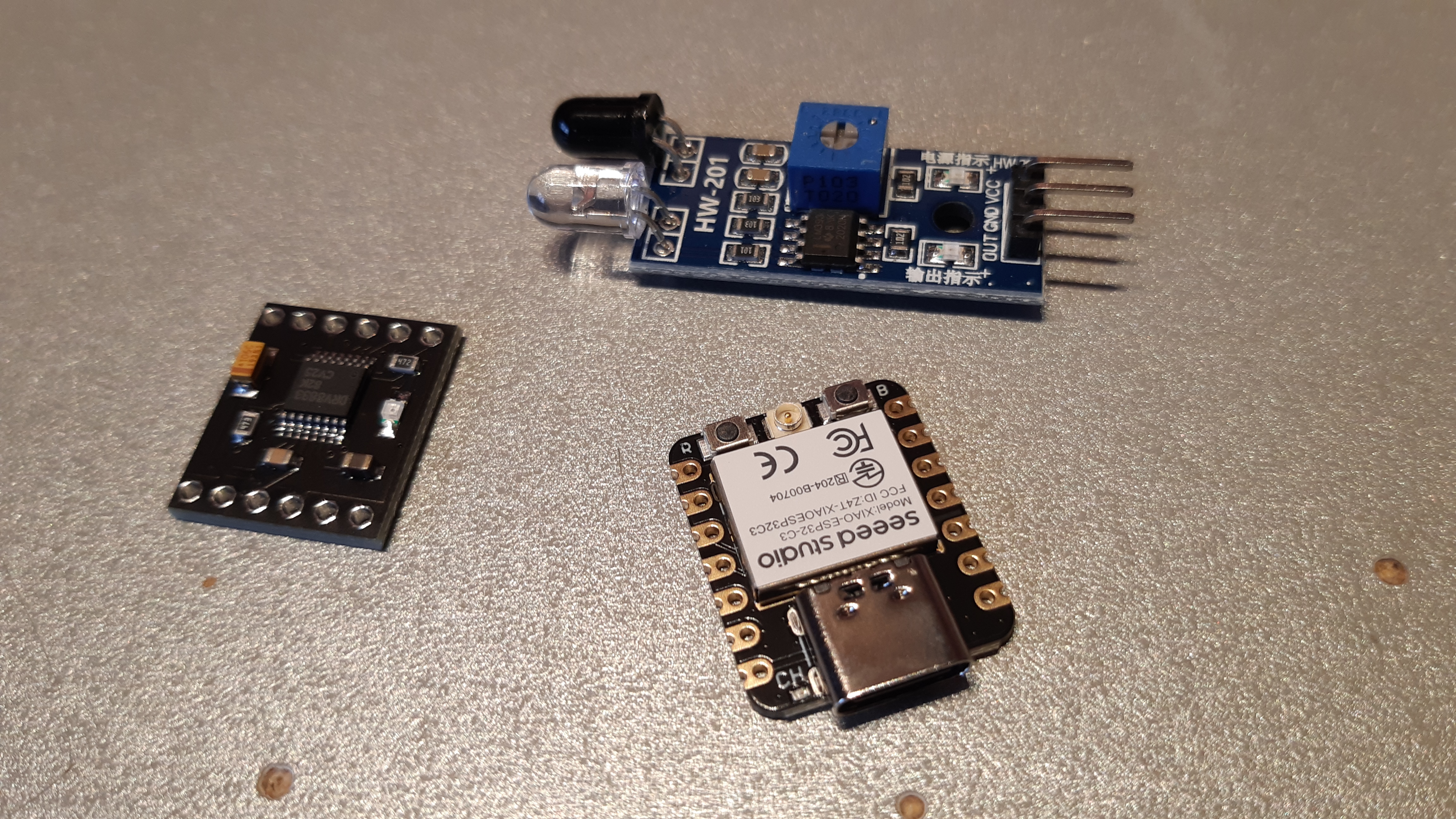
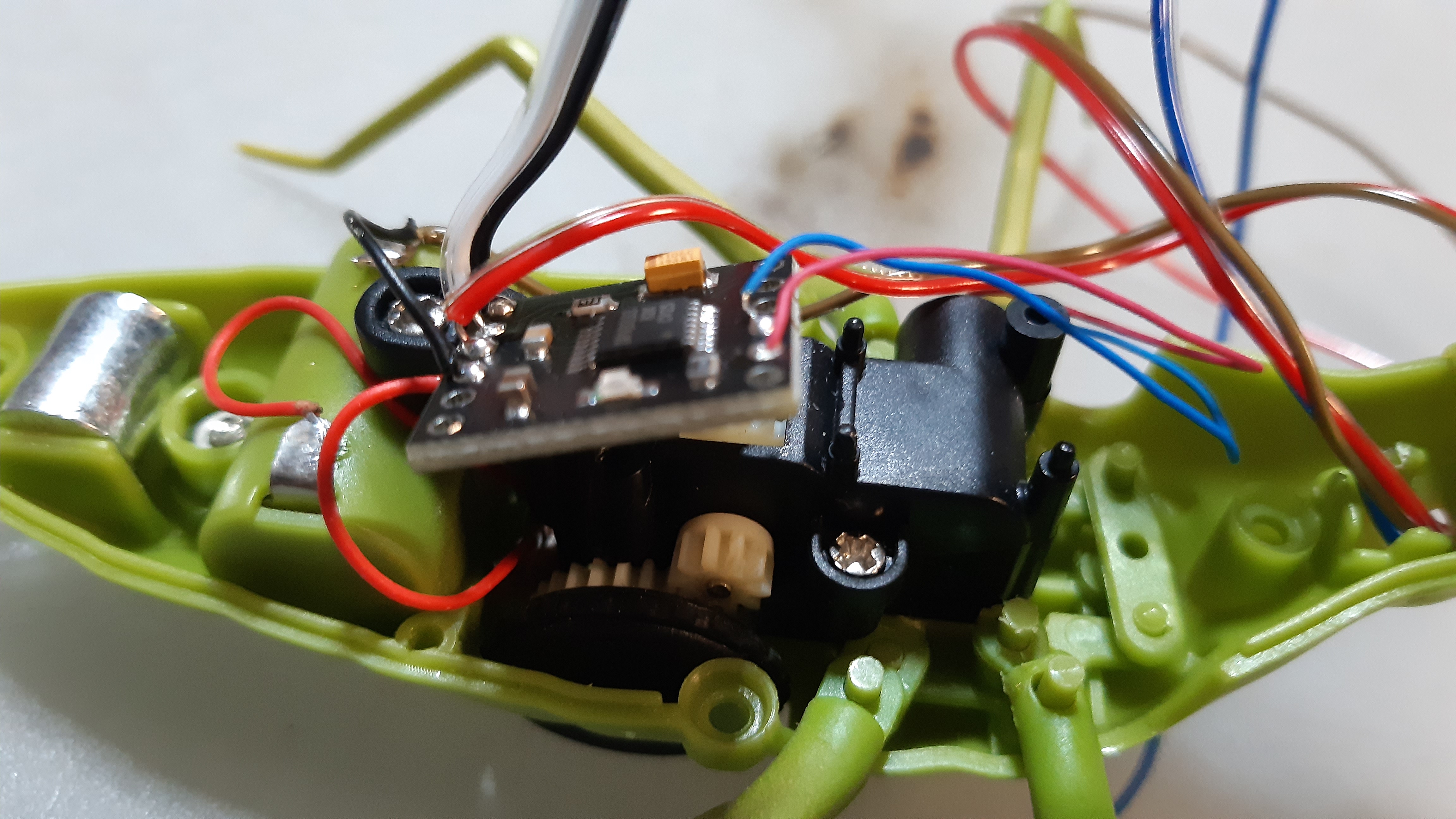
Aufgrund der geringen Abmessungen der Spielzeug-Mantis war schnell klar, dass die verwendeten Bauteile (Mikrocontroller, Motortreiber, IR-Sensor) möglichst klein sein mussten, um in oder an der Spielzeug-Mantis befestigt werden zu können. Daher fiel die Wahl auf den Mikrocontroller XIAO ESP32-C3 und eine kleine Motortreiberplatine DRV8833, während ein noch vorhandenes IR-Sensormodul HW-201 zum Einsatz kommen sollte:
Zunächst wurde die Steuerplatine sowie eine vorhandene Blink-LED aus der Spielzeug-Mantis entfernt, wobei die Anschlusskabel für Motor und Batteriestrom wiederverwendet werden sollten:
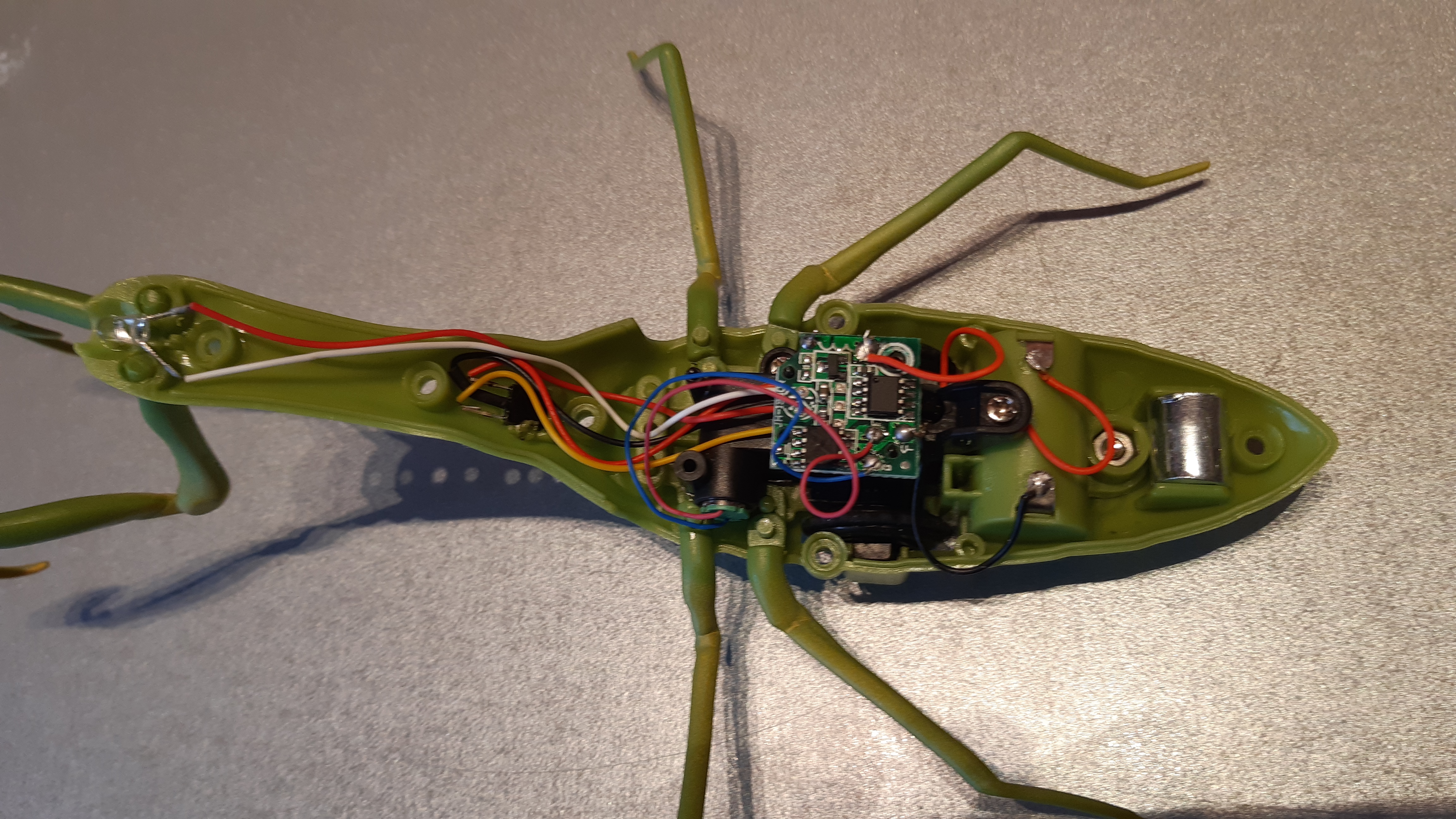
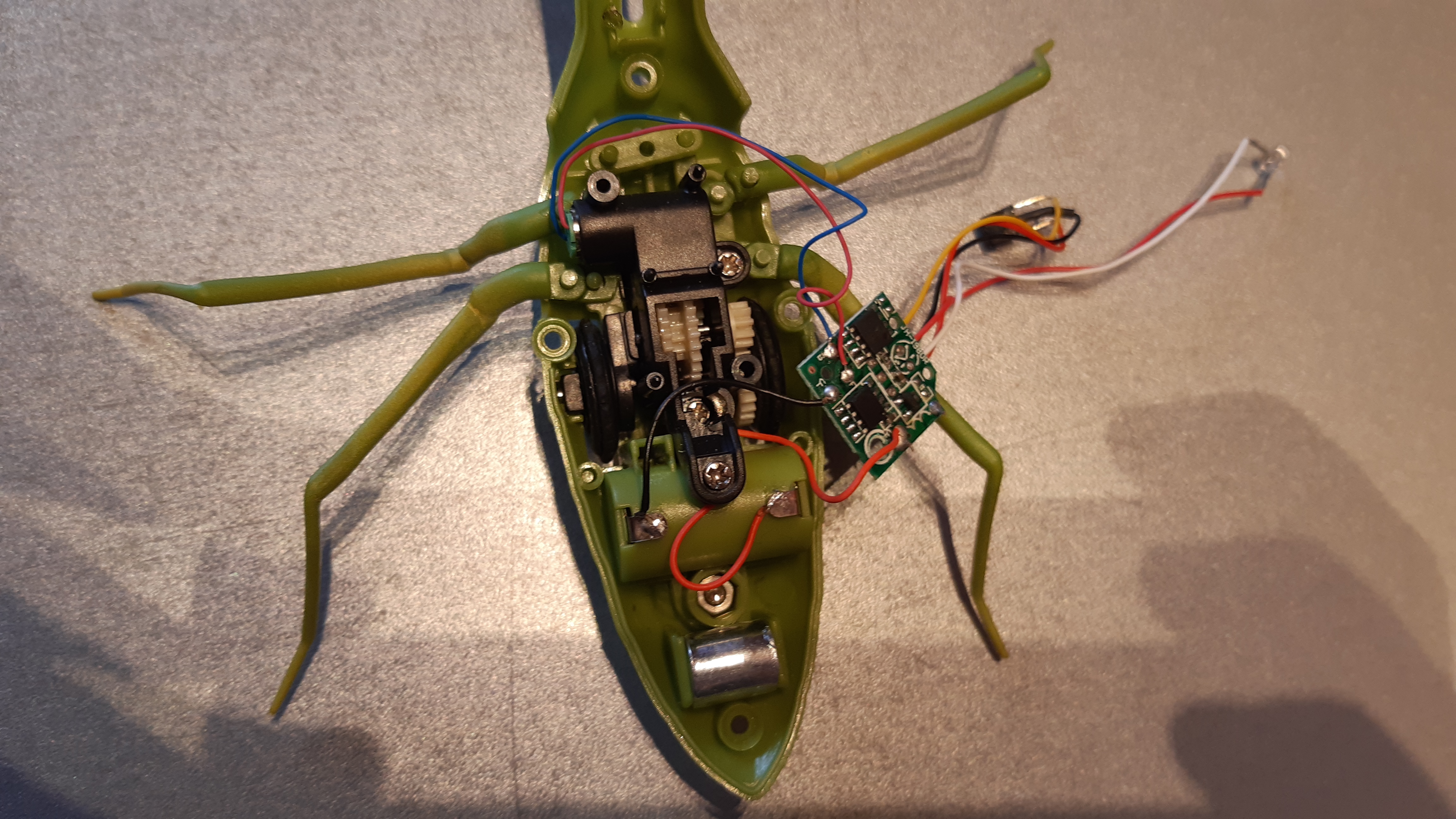
Anschließend wurde das Motortreiber-Modul an die Stelle innerhalb der Spielzeug-Mantis befestigt, wo vorher die Steuerplatine montiert war, da deren Größe nahezu identisch ist:
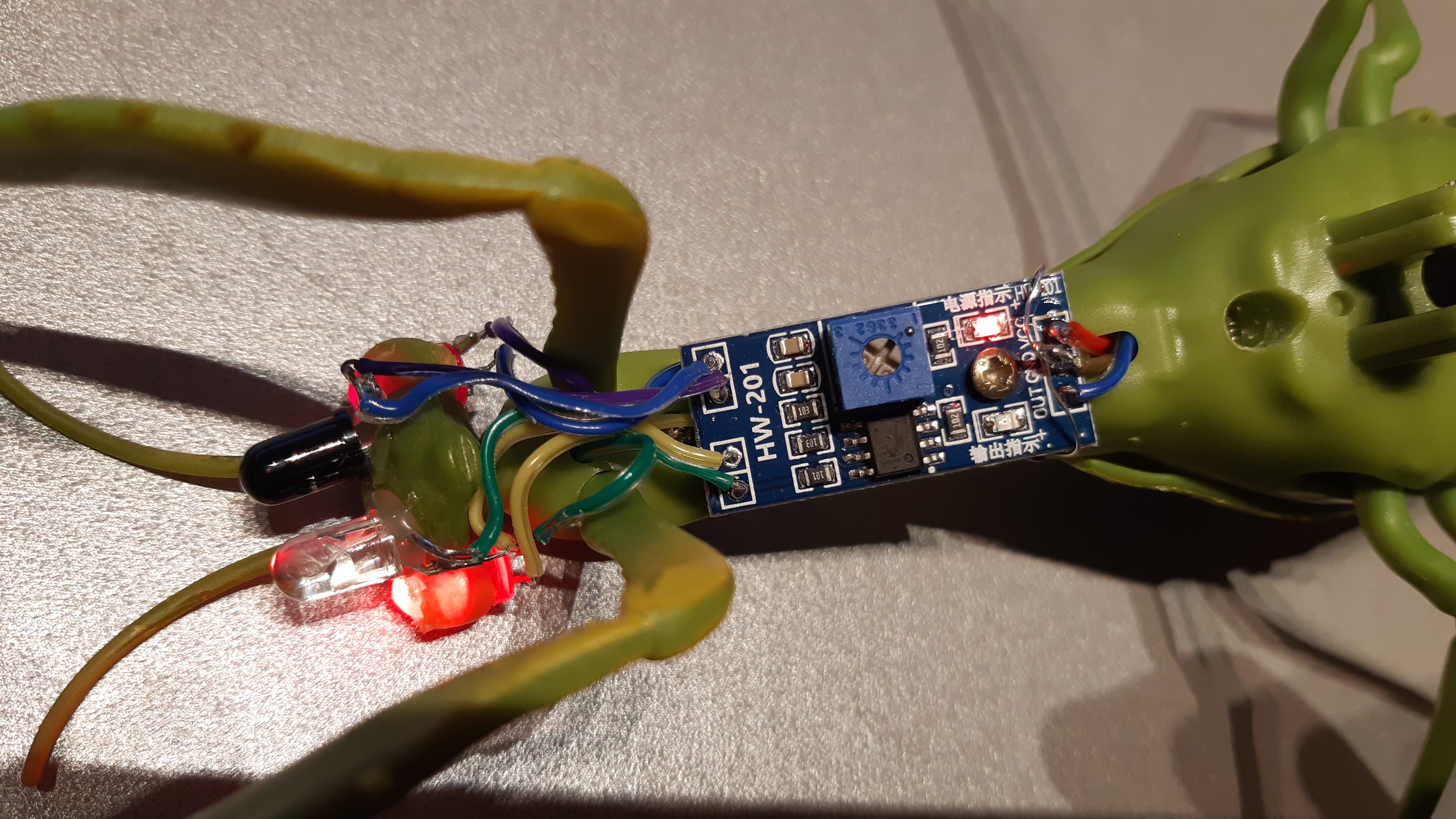
Die Infrarot-LEDs des Moduls HW-201 wurden abgelötet und sollten die "Augen" der Spielzeug-Mantis werden, wozu 5mm-Löcher in die Facettenaugen im Kopf der Spielzeug-Mantis gebohrt wurden:


Leider funktionierte das IR-Modul mit den nun weit auseinanderstehenden Infrarot-LEDs nicht, sodass diese vorne im richtigen Abstand voneinander an den Kopf der Spielzeug-Mantis geklebt werden mussten. Das IR-Modul selbst wurde unterhalb des verlängerten Thorax' (Brustbereich) der Spielzeug-Mantis montiert. Um die nun entstandenen "Löcher" in den Facettenaugen der Spielzeug-Mantis zu füllen, wurden an Stelle der Infrarot-LEDs 2 rote LEDs als "Augen" dort platziert, die über den Mikrocontroller getrennt voneinander programmiert werden können:

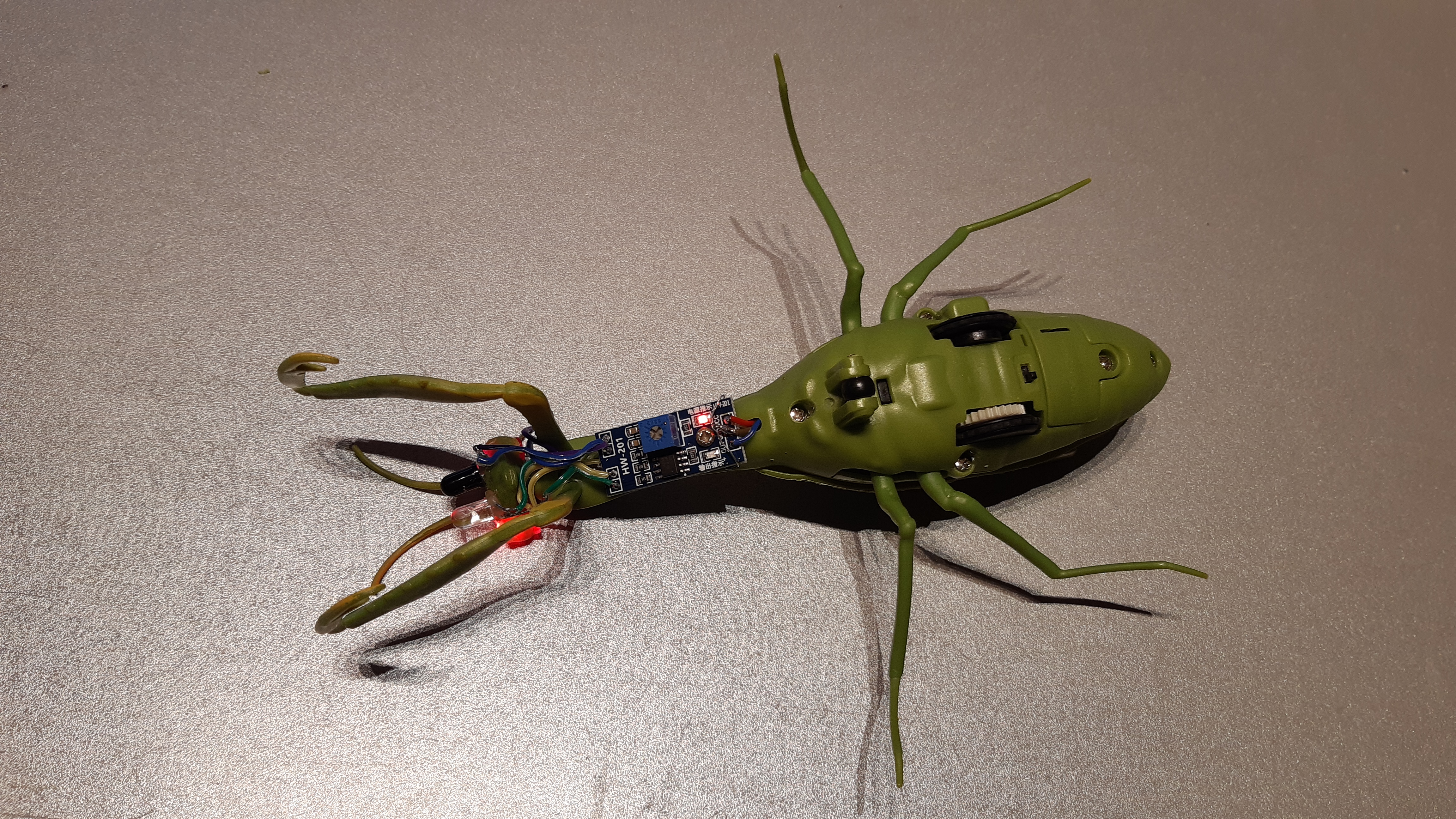
Der Mikrocontroller XIAO ESP32-C3 passte trotz seiner geringen Abmessungen zwar nicht mehr in den Körper der Spielzeug-Mantis, konnte aber - gut verdeckt durch die "Flügeldecken" - auf den Hinterleib der Spielzeug-Mantis geklebt werden. Auch die steckbare BT/WLAN-Antenne des Mikrocontrollers wurde unter den "Flügeldecken" auf den Hinterleib geklebt. Zwischen Antenne und Mikrocontroller wurden durch entsprechende Bohrungen alle benötigten Kabel vom Mikrocontroller in das Innere der Spielzeug-Mantis geführt:

Die in der Spielzeug-Mantis eingesetzten 3x LR44 Batterien lieferten leider nicht die gewünschte Leistung für den Mikrocontroller-Betrieb der Spielzeug-Mantis, weshalb hier ein noch vorhandener Li-ION-Akku mit 780 mAh zum Einsatz kommen musste. Der Akku konnte aufgrund seiner Abmessungen jedoch nur sichtbar auf die Flügeldecken der Spielzeug-Mantis geklebt werden, wobei die eingebaute Ladeelektronik des XIAO ESP32-C3 jedoch das Aufladen des Akkus bei eingestecktem USB-Kabel (USB-C) ermöglicht. Auch wenn durch den Umbau von außen nun viele elektronische Bauteile sichtbar sind, bleibt die Spielzeug-Mantis doch insgesamt gut erkennbar:
Das hier ausgeführte Python-Programm schaltet zunächst beide roten "Augen"-LEDs an und wieder aus, sobald der IR-Sensor ein Hindernis vor der Spielzeug-Mantis erkennt. In diesem Fall fährt die Spielzeug-Mantis langsam vorwärts, bis kein Hindernis mehr zu sehen ist. Die Spielzeug-Mantis "folgt" auf diese Weise einer vor ihr fliehenden "Beute".
Die geringen Abmessungen der Spielzeug-Mantis machten die Auswahl entsprechend kleiner Komponenten notwendig, auch konnte hier keine komfortable Streifenrasterplatinen-Lösung für die Verkabelung aller elektronischen Bauteile verwendet werden. Stattdessen musssten alle Kabelverbindungen ohne Buchsen oder Stecker direkt an den Mikrocontroller, die Sensoren und Aktoren gelötet werden, was mit deutlich mehr Aufwand verbunden ist und überdies die Gefahr von irreversiblen Schäden an den Komponenten erhöht.
Doch das Ergebnis ist insgesamt die Mühe wert: Durch den Einsatz eines mit Micropython programmierbaren Mikrocontrollers wird die Spielzeug-Mantis zu einem sensorgesteuerten Roboterinsekt, welches in Teilen autonom auf seine Umwelt reagieren kann. In Verbindung mit der BLE- oder WLAN-Konnektivität des ESP32-C3 wird die Spielzeug-Mantis auch mit dem Smartphone steuerbar.