|
Einen Robterarm mittels Mikrocontroller zu steuern bietet sich geradezu an, da die verbauten Servomotoren dank vorhandener Bibliotheken leicht programmierbar sind. Darüber hinaus können Roboterarme - z.B. mittels Potentiometer - entweder manuell gesteuert werden oder es lassen sich vollständig automatische Bewegungsabläufe z.B. zur Simulation von Produktionsprozessen programmieren. Zudem lassen sich Roboterarme leicht selbst mittels 3D-Drucker herstellen, was den Kostenaufwand reduziert. In Verbindung mit Bluetooth oder WLAN lassen sich solcherart konstruierte Roboterarme auch mittels Smartphone steuern
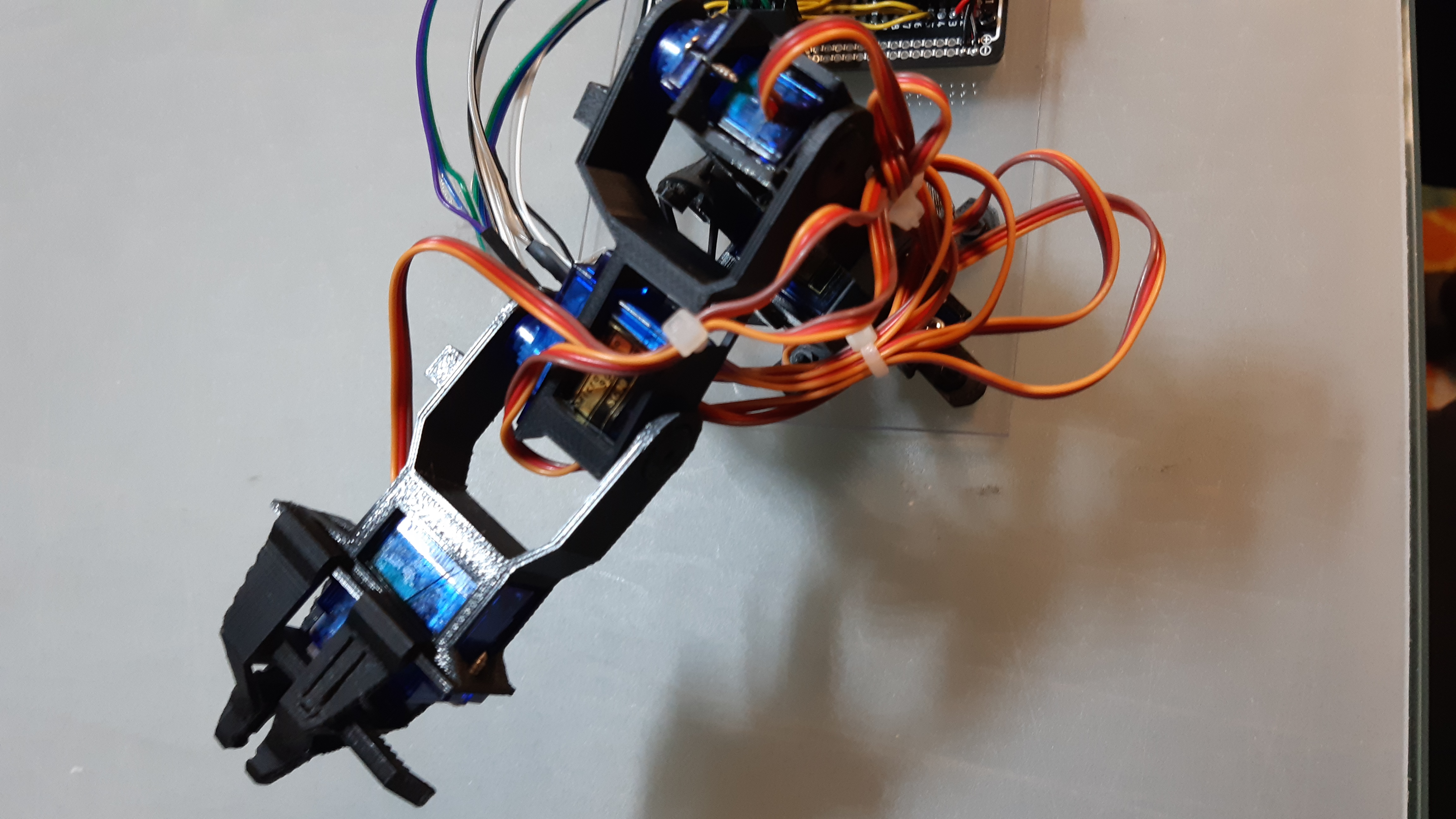
Der Einsatz der 3D-gedruckten Roboterarme in der Schule erforderte jedoch einen erheblichen Verkabelungs- und Befestigungsaufwand, so dass die Roboterarme jeweils mit vollständiger Steuerelektronik auf eine stabile und rutschfeste Unterlage montiert werden sollten.
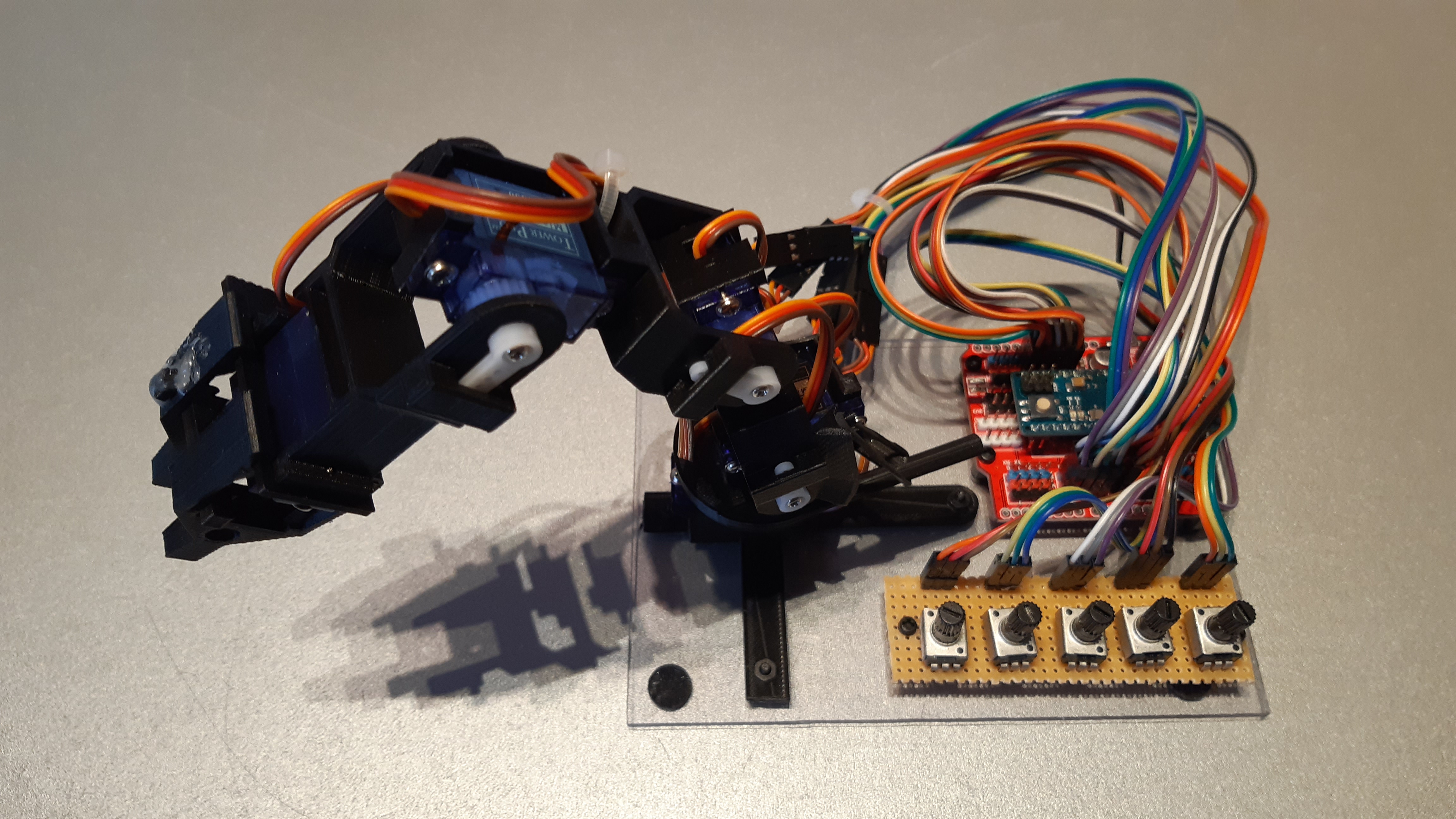
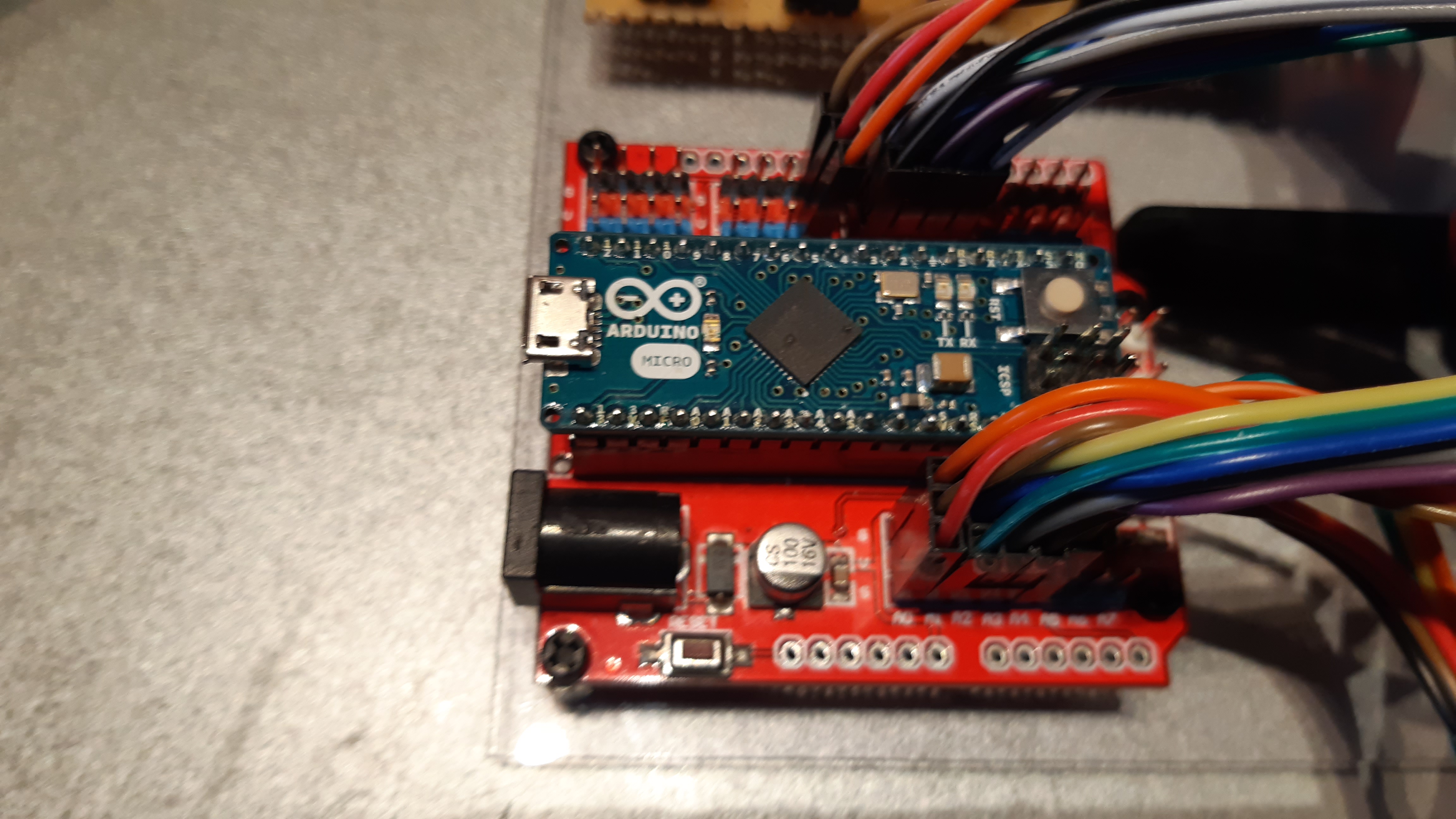
Zunächst wurde der Roboterarm mittels 3D-Drucker gedruckt und mit den Servomotoren montiert. Anschließend wurde mittels Kabelverlängerungen die Verbindung zum Arduino Sensor Shield hergestellt. Danach wurde eine Streifenrasterplatine zurechtgeschnitten und darauf die fünf Potentiometer sowie fünf 3polige Steckkontakte gelötet. Alle drei Komponenten (Roboterarm, Arduino Sensor Shield und Streifenrasterplatine) wurden zuletzt mittels Kunsttoffschrauben und -abstandshalter auf die Plaxiglasscheibe montiert.
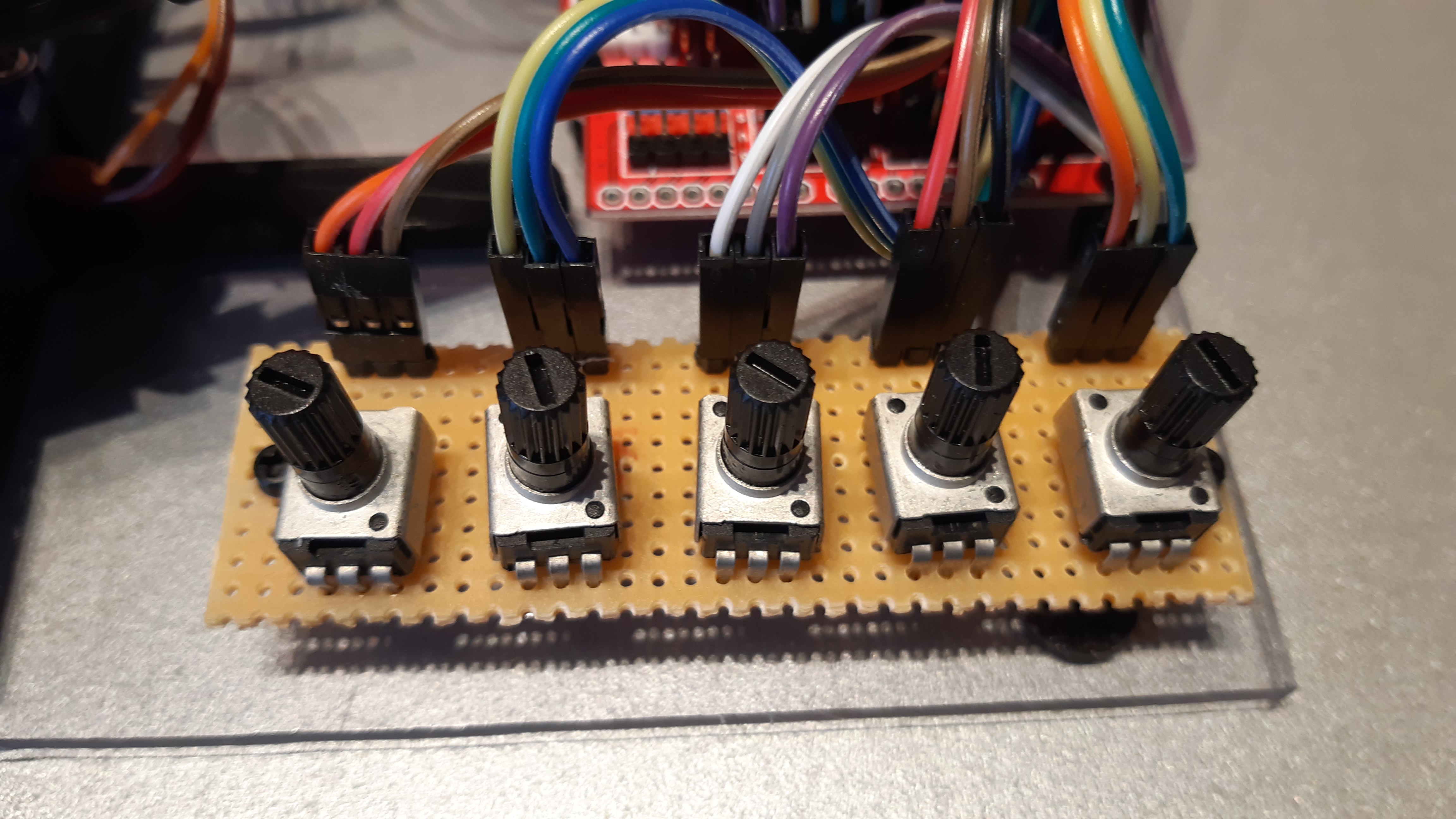
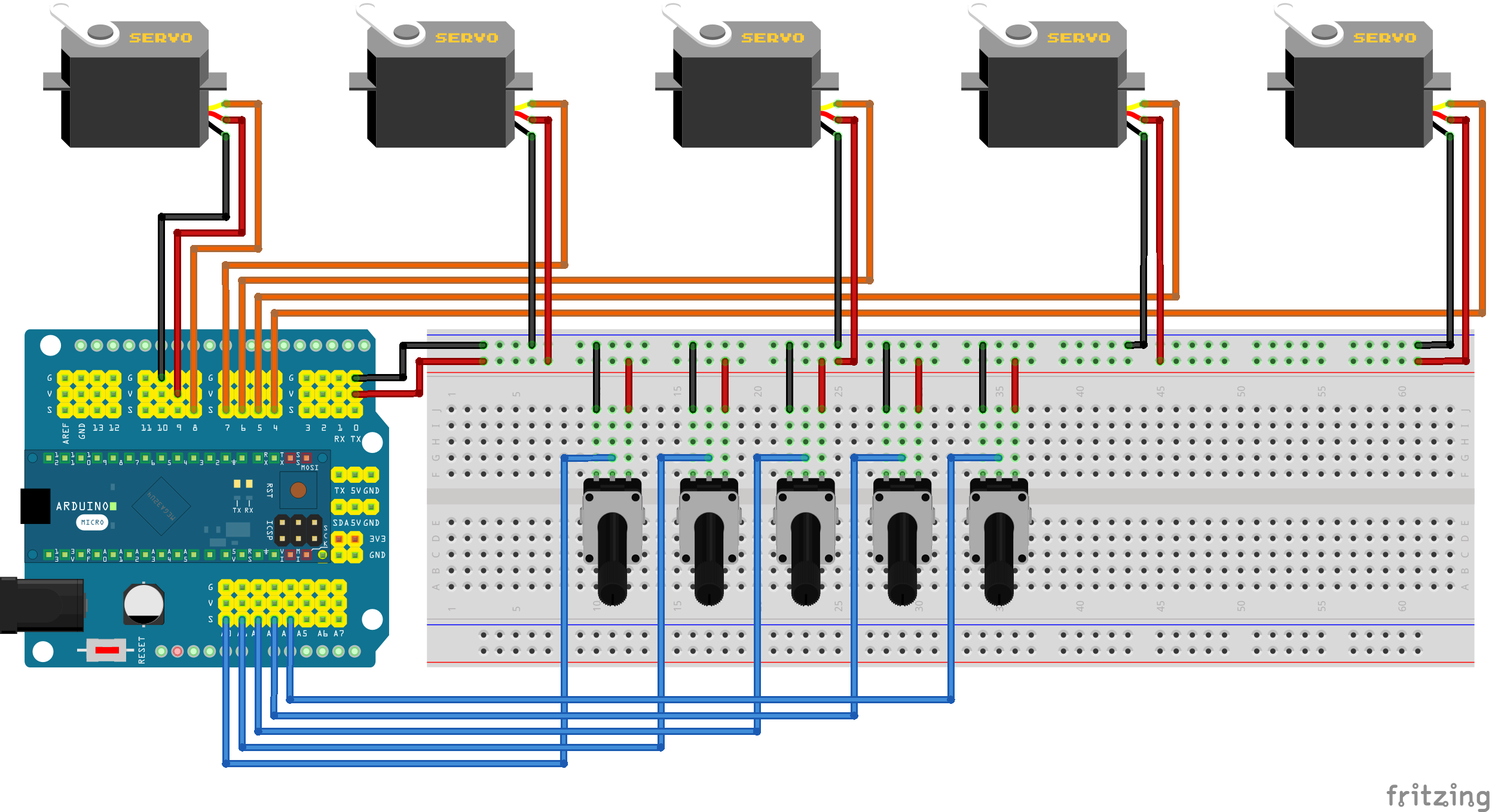
In dem hier ausgeführten Arduino-Sketch lässt sich jeder der fünf Servomotoren des Roboterarms mittels eines eigenen Potentiometers steuern.

Die Ansteuerung von Servomotoren mittels MicroPython ist ebenfalls problemlos möglich, zudem bietet der WEMOS D1 mini dank integriertem WLAN die Möglichkeit, ein browserbasiertes und per Smartphone nutzbares Interface zu programmieren.
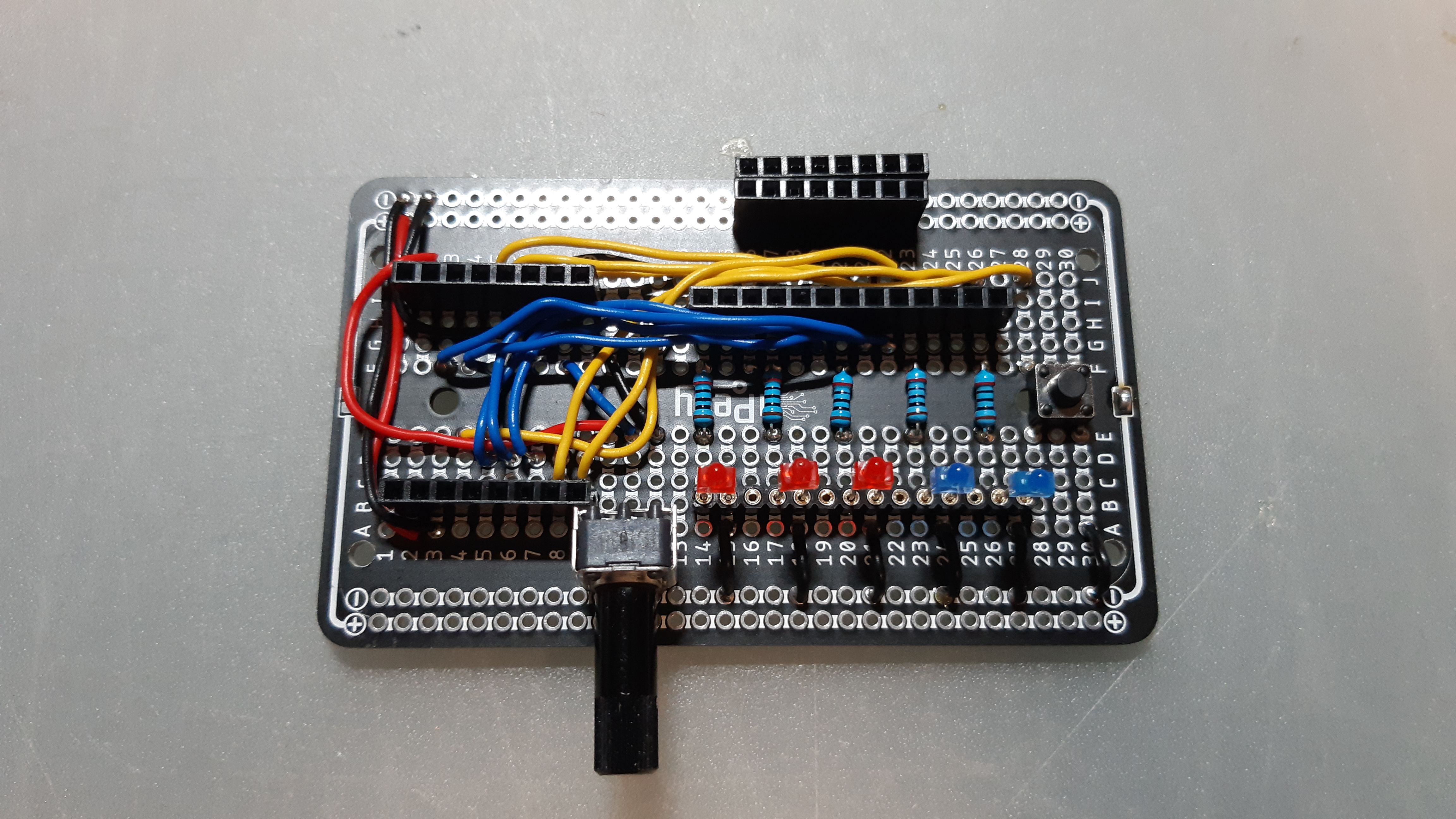
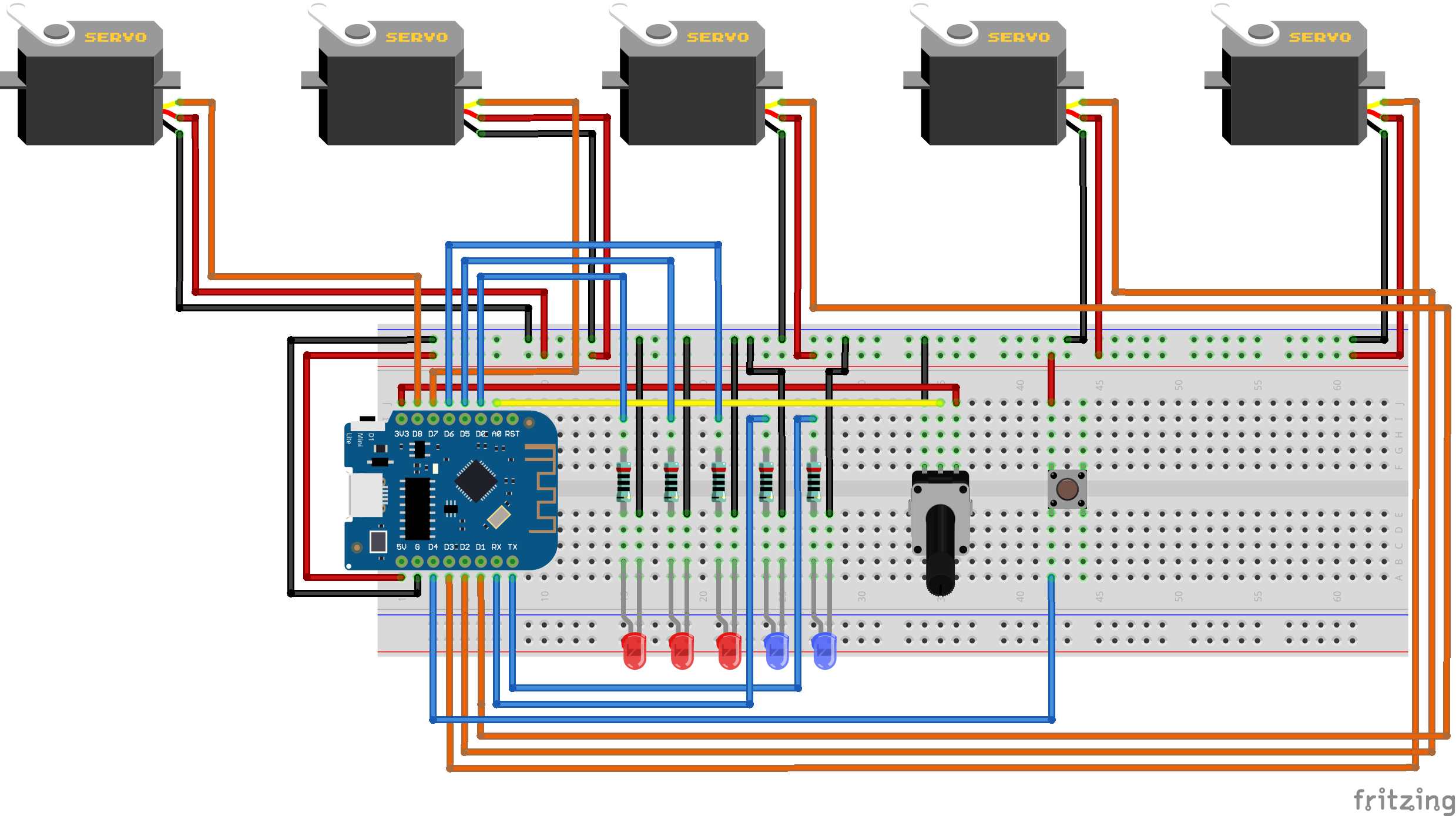
Anders als bei der Arduino-Variante wurde in diesem Projekt die gesamte Elektronik auf eine Streifenrasterplatine im Breadboard-Layout gelötet, wobei sowohl der WEMOS D1 mini als auch die LEDs sowie die Anschlüsse der Servomotoren mittels Buchsenleisten steckbar sein sollten:

Sowohl der Roboterarm als auch die Streifenrasterplatine wurden anschließend mittels Kunststoffschrauben und -abstandshalter auf die Plaxiglasscheibe montiert:
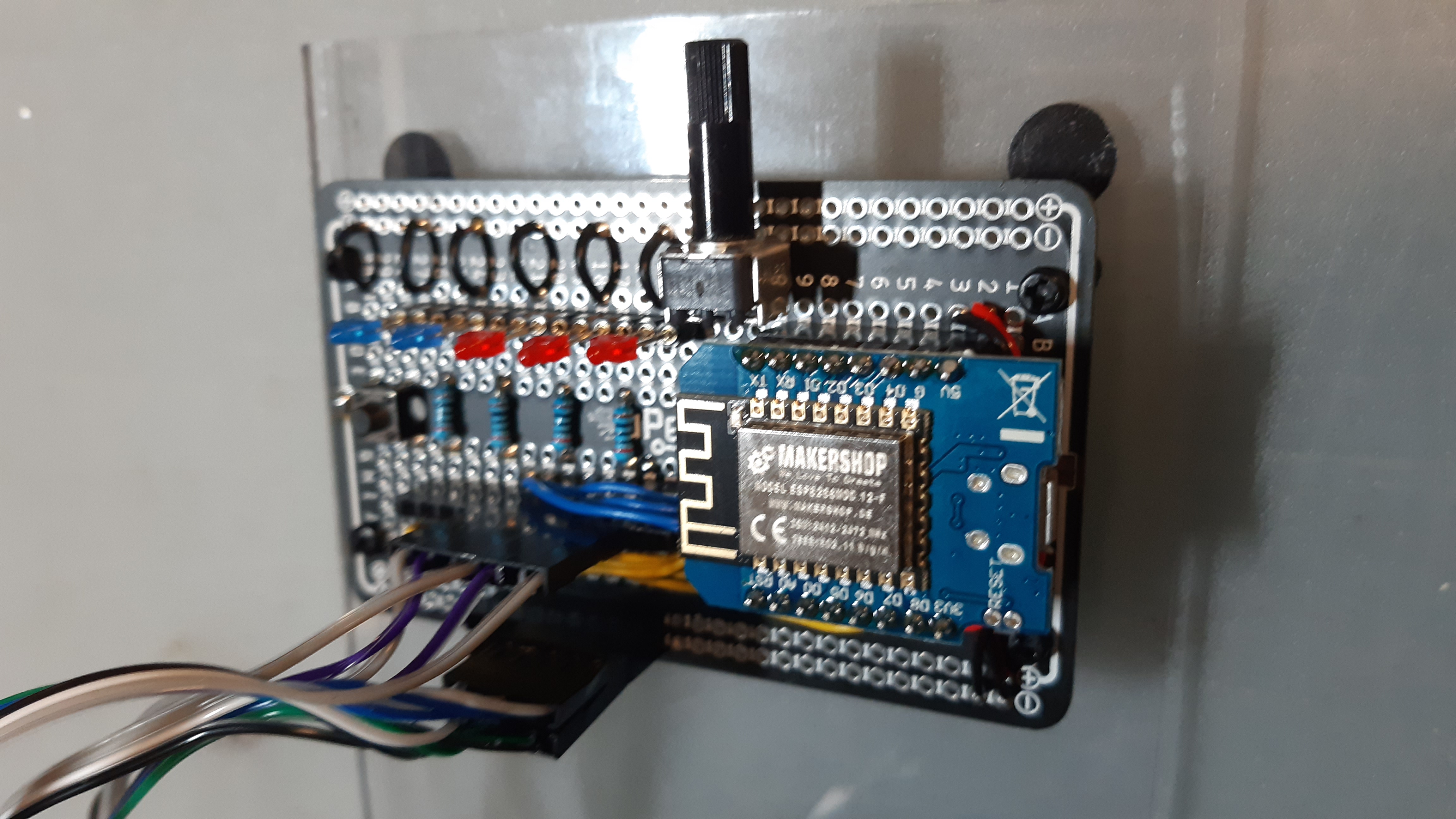
Mittels des hier ausgeführten MicroPython-Programms wird mittels des Tasters reihum zwischen fünf Zuständen gewechselt. In jedem Zustand kann einer der Servomotoren mittels des Potentiometers manuell gesteuert werden. Die drei roten LEDs zeigen dabei binär die Nummer des gerade aktiven Servomotors (1-5) an. Ursprünglich sollten fünf LEDs den jeweils aktiven Servomotor anzeigen (daher die zwei zusätzlichen, jetzt blauen LEDs), was theoretisch mittels des TX- und RX-Pins auch funktioniert hat; allerdings gab es dann keine Möglichkeit mehr, Programmcode mittels USB zu übertragen, da dieser ebenfalls mit den Kontakten TX und RX verbunden ist. Nun zeigen die beiden blauen LEDs die USB-Kommunikation an, ähnlich wie bei vielen Arduino-Boards.
Im Vergleich zur Arduino-Variante des Roboterarms ergeben sich folgende Änderungen beim Material:
Der Schaltplan ähnelt dem der Arduino-Variante und zeigt, dass alle digitalen und analogen Ein-/Ausgänge des WEMOS D1 mini für dieses Projekt genutzt werden mussten:
Die Programmierung erfolgte hier über die Thonny-IDE, während eine WLAN-Steuerung am Smartphone z.B. mittels Browser möglich wäre.
Solange keine größeren Modelle zur Verfügung stehen, eignen sich 3D-gedruckte Roboterarme gut für ein erstes Expermientieren mit Servomotoren und der Simulation von autonomen Steuerungen. Diese Modelle sollten fest auf eine stabile Unterlage montiert werden, um eine Standsicherheit (auch bei "ruckartigen" Bewegungen) zu gewährleisten.
Die preisgünstigen Servomotoren sowie die nicht übermäßig belastbaren, teils dünnwandigen 3D-Elemente führen auch bei sachgemäßem Gebrauch gelegentlich zu Verschleiß und erfordern dann einen Austausch von Servomotoren und/oder 3D-Druckteilen.
Auch bei diesem Projekt kann als Codeerweiterung eine Steuerung per Bluetooth oder WLAN mittels Smartphone-App programmiert werden. Ein ESP32 als Mikrocontroller würde beide Voraussetzungen erfüllen und hätte überdies auch Anschlussmöglichkeiten für weitere Aktoren und Sensoren.